Robotic platform for peripheral lung tumour intervention based on magnetic tentacles.

A close up of the phantom lung and the magnetic tentacle robot.

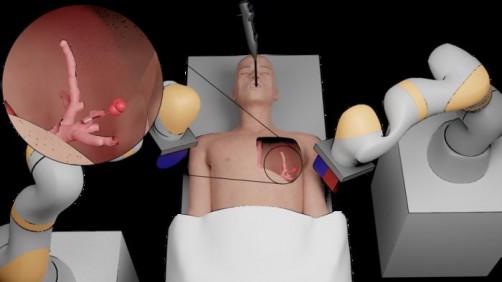
First demonstration of bimanual magnetic soft robots for skull-base surgery.
Newswise — The revolutionary ultra-soft tentacle, guided by magnets and measuring a mere 2 millimeters in diameter, possesses the capability to access even the tiniest bronchial tubes. Its development at the renowned STORM Lab in Leeds, involving collaboration among engineers, scientists, and clinicians, heralds a transformative breakthrough in lung cancer treatment. This innovative technology opens the door to a highly precise, personalized, and significantly less intrusive method of treatment.
In their experiments, the magnetic tentacle robot was put to the test on a cadaver's lungs, and the findings revealed that it can penetrate 37% deeper compared to conventional equipment, while also causing less damage to the surrounding tissue.
These significant research outcomes, financially supported by the European Research Council, have been officially disclosed in today's edition of Nature Engineering Communications.
Professor Pietro Valdastri, the esteemed Director of the STORM Lab and the supervising researcher, expressed great enthusiasm about this groundbreaking advancement.
"The unique attributes of this novel approach lie in its anatomical specificity, softness relative to the human body, and complete shape control through magnetic guidance. These three key characteristics hold the promise of revolutionizing internal navigation within the body."
Lung cancer stands as the leading cause of cancer-related deaths worldwide. In cases of early-stage non-small cell lung cancer, which comprises approximately 84% of occurrences, the standard treatment involves surgical intervention. Nonetheless, this method is generally highly invasive, resulting in substantial tissue removal. Unfortunately, not all patients are suitable candidates for this approach, and it can significantly affect lung function.
The implementation of lung cancer screening programs has undoubtedly contributed to improved survival rates. However, it has also underscored the pressing necessity for non-invasive methods to diagnose and treat patients at an early stage.
Beyond enhancing lung biopsy procedures by enabling more precise navigation, the magnetic tentacle robot holds the potential to revolutionize treatment approaches significantly. By using this technology, clinicians could pursue far less invasive treatments, specifically targeting malignant cells while preserving the normal function of healthy tissues and organs. This advancement offers hope for more effective and targeted therapies, fostering better outcomes for patients.
Dr. Giovanni Pittiglio, a co-author of the report, conducted this research as part of his Ph.D. at the University of Leeds's School of Electronic and Electrical Engineering. He emphasized their objective: to provide curative assistance to patients with minimal discomfort.
Utilizing remote magnetic actuation, they achieved this goal through the use of ultra-soft tentacles capable of reaching deeper within the body, conforming to the anatomy, and minimizing trauma.
With promising results, the team's next step involves gathering all the necessary data to initiate human trials. This crucial phase brings them closer to potentially implementing this groundbreaking technology for real-world medical applications.
At the STORM Lab, researchers have explored the possibilities of coordinating two independent magnetic tentacle robots to collaborate within a confined area of the human anatomy. This joint effort enables one robot to maneuver a camera while the other controls a laser for precise tumor removal.
These robots are constructed from silicone to minimize tissue damage and are guided by magnets positioned on robotic arms located outside the patient's body.
In a notable experiment using a simulated skull, the team successfully conducted endonasal brain surgery, a technique that grants surgeons access through the nose to operate on regions at the front of the brain and the top of the spine. By effectively employing the synchronized actions of the magnetic robots, the potential for minimally invasive procedures with improved precision and reduced patient trauma becomes increasingly evident.
To accomplish their objectives, the researchers required the magnetic robots to operate autonomously, with one responsible for maneuvering the camera and the other directing the laser onto the tumor.
Initially, the close proximity of two magnets would naturally lead to attraction, posing a challenge for the researchers. However, they ingeniously surmounted this obstacle through strategic design choices. The tentacle bodies were engineered to flex exclusively in predefined directions, and the north and south poles within each magnetic robot tentacle were repositioned. This clever approach ensured independent and precise movement for each robot, facilitating seamless coordination during their critical tasks.
Through their groundbreaking research, the team successfully simulated the removal of a benign pituitary gland tumor located at the base of the cranium. This achievement marked a momentous milestone as it demonstrated, for the first time ever, the capability of controlling two robots within a confined area of the body.
The research findings, jointly supported by the European Research Council and the Physical Sciences Research Council, have been officially published in Advanced Intelligent Systems.
Zaneta Koszowska, the lead author of the paper and a researcher at the University of Leeds School of Electronic and Electrical Engineering, expressed the significance of their work in the field of magnetically controlled robotics. Their results unequivocally showcased the feasibility of conducting both diagnostic procedures, utilizing a camera, and full-fledged surgical procedures within small anatomical spaces. This breakthrough has immense implications for the advancement of minimally invasive medical interventions.
MEDIA CONTACT
Register for reporter access to contact detailsArticle Multimedia

Credit: STORM Lab, University of Leeds
Caption: Robotic platform for peripheral lung tumour intervention based on magnetic tentacles.

Credit: STORM Lab, University of Leeds
Caption: A close up of the phantom lung and the magnetic tentacle robot.

Credit: STORM Lab, University of Leeds
Caption: First demonstration of bimanual magnetic soft robots for skull-base surgery.